| Код | 408843 | ||
| Дата создания | 2018 | ||
| Страниц | 33 ( 14 шрифт, полуторный интервал ) | ||
| Источников | 31 | ||
| Изображений | 13 | ||
|
Файлы
|
|||
|
Без ожидания: файлы доступны для скачивания сразу после оплаты.
Ручная проверка: файлы открываются и полностью соответствуют описанию.
|
|||










Задание
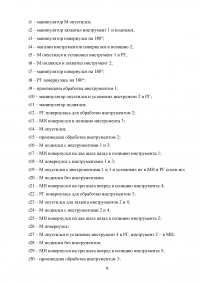
Последовательность операций: в начале обработки двухзахватный М правым захватом берет Ин. №1 из 1-го гнезда МИ (ходом вверх), поворачивает руку на 180о в горизонтальной плоскости и ставит Ин. в верхнее гнездо РГ, которая поворачивается тоже на 180о и начинается обработка заготовки. МИ поворачивается на шаг вперед, М правым захватом берет Ин. №2 из 2-го гнезда и ставит его в свободное верхнее гнездо РГ. Когда 1-й Ин. закончит обработку, РГ сменит позицию и обработку начнет 2-й Ин. МИ сделает еще шаг вперед, М захватит отработавший Ин. №1 и новый Ин. №3 в МИ, повернется на 180о. В это время МИ сделает 2 шага назад и М установит Ин. №3 гнездо РГ и Ин. №1в его родное гнездо №1 МИ. Далее будет повторяться в цикле: 1 шаг вперед МИ для взятия нового Ин. и 2 шага назад МИ для установки в родное гнездо отработавшего Ин.
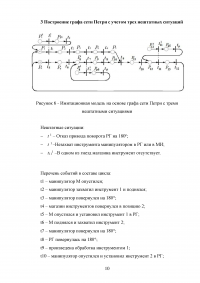
На основе циклограммы построить имитационную модель в виде графа сети Петри с учетом следующих нештатных ситуаций:
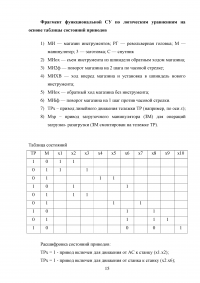
Разработать фрагмент функциональной СУ по логическим уравнениям на основе таблицы состояний приводов.
Предложить алгоритм работы системы замены инструмента без кодирования. Инструменты в гнездах магазина установлены в заданной последовательности обработки заготовок (согласно маршрутной технологической карте).
...
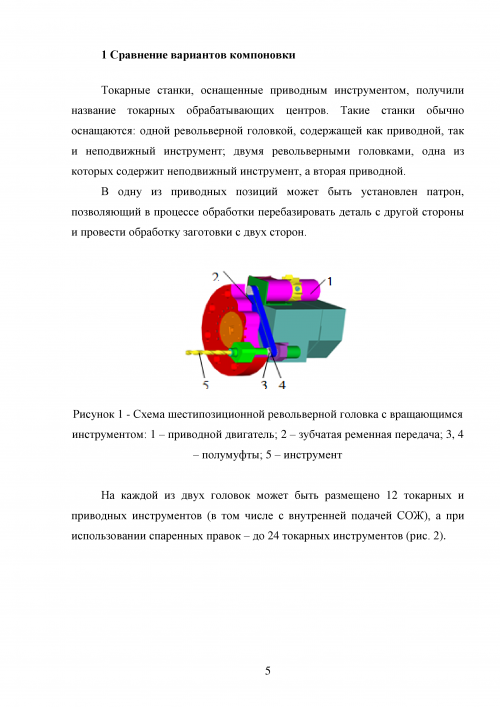
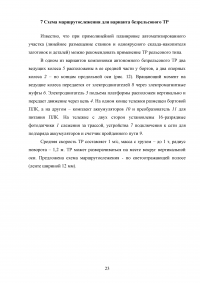
1 Сравнение вариантов компоновки
Токарные станки, оснащенные приводным инструментом, получили название токарных обрабатывающих центров. Такие станки обычно оснащаются: одной револьверной головкой, содержащей как приводной, так и неподвижный инструмент; двумя револьверными головками, одна из которых содержит неподвижный инструмент, а вторая приводной.
В одну из приводных позиций может быть установлен патрон, позволяющий в процессе обработки перебазировать деталь с другой стороны и провести обработку заготовки с двух сторон.
...
4 Фрагмент графа достижимости (ГД) и матрицы входных и выходных инциденций
Фрагмент ГД построим для двух параллельных ветвей: модуля М – Шт и модуля М – ТР (см. рис. 6 - граф сети Петри).
...
5 Структурная схема с программной реализацией алгоритма управления объектом (с использованием ПЛК)
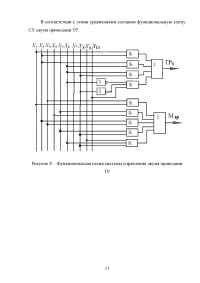
Функциональная схема СУ, полученная на основе таблицы состояний приводов ТР, реализуется аппаратным способом (жесткая логика). В этом случае при необходимости изменения логики работы технического объекта приходится заменять на печатной плате состав комплектующих элементов и электрические соединения между ними.
...
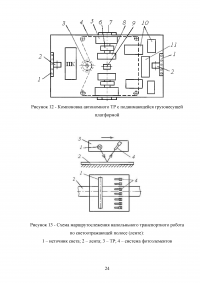
7 Схема маршрутослежения для варианта безрельсового ТР
Известно, что при прямолинейной планировке автоматизированного участка (линейное размещение станков и одноярусного склада-накопителя заготовок и деталей) можно рекомендовать применение ТР рельсового типа.
...
ПРИЛОЖЕНИЕ
Программа генерации кода
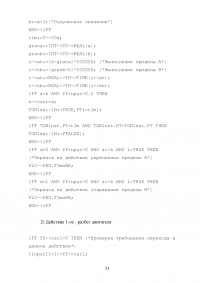
1) Описание неустойчивых проекта управления
...
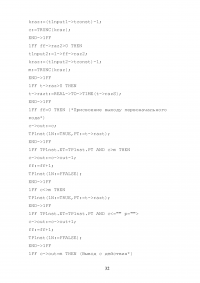
2) Действие 1-ое - разбег двигателя
...
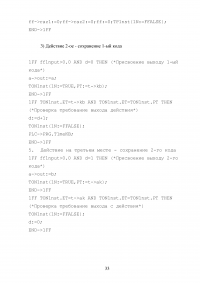
3) Действие 2-ое - сохранение 1-ый кода
...