| Код | 189310 | ||
| Дата создания | 2017 | ||
| Страниц | 34 ( 14 шрифт, полуторный интервал ) | ||
| Источников | 4 | ||
| Изображений | 12 | ||
| Оригинальность | 88.4 % | Antiplagiat [ проверено 19.11.2019 ] | ||
|
Файлы
|
|||
|
Без ожидания: файлы доступны для скачивания сразу после оплаты.
Ручная проверка: файлы открываются и полностью соответствуют описанию. Документ оформлен в соответствии с требованиями ГОСТ.
|
|||





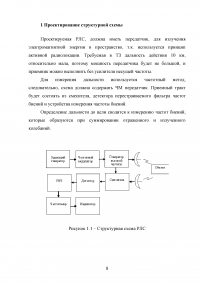
















В данной работе спроектирована РЛС с непрерывным излучением и частотной модуляцией, с параметрами, указанными в техническом задании (ТЗ). Система обеспечивает наблюдение и измерение параметров (азимута и дальности) наблюдаемых целей. Спроектированная система содержит передатчик ЧМ сигнала, приемник построенный по супергетеродинной схеме, спектроанализатор, выполненный по параллельной схеме, индикатор на ЭЛТ с магнитным управлением. В пояснительной записке представлен расчёт параметров РЛС, состоящей из этих блоков, и определены типы элементов, используемых в РЛС.
Радиотехнические системы (РТС) – системы, которые используются для определения местоположения и параметров движения объектов. Под объектами понимаются летательные аппараты, ракеты, корабли или любые другие неподвижные или движущиеся объекты, параметры движения которых, измеряются с помощью электромагнитных волн. Из числа РТС, обеспечивающих получение информации о движении объектов, важнейшее значение имеют радиолокационные системы.
Радиолокацией называют отрасль техники, охватывающей радиотехнические методы и средства обнаружения, определения координат объектов с помощью отражения, переизлучения или излучения ими радиоволн.
В данной курсовой работе спроектирована радиолокационная система для наблюдения за кораблями, с непрерывным излучением и частотной модуляцией, предназначенная для наблюдения за судами при входе в гавань. РЛС с непрерывным излучением обладает определенными преимуществами перед импульсными, а именно: низкой излучаемой мощностью и лучшим качеством селекции целей по скорости, простотой конструкции и обработки сигналов.
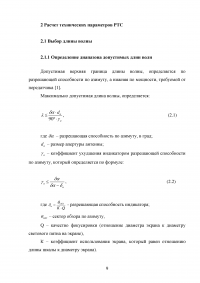
2.1.1 Определение диапазона допустимых длин волн
Допустимая верхняя граница длины волны, определяется по разрешающей способности по азимуту, а нижняя по мощности, требуемой от передатчика [1].
Максимально допустимая длина волны, определяется:
...
2.3.1 Определение площади раскрыва антенны
Для обзорных РЛС желательно равномерное облучение целей, что обеспечивается при косекансной диаграмме направленности антенны в вертикальной плоскости:
...
Площадь раскрыва антенны определяется по формуле:
...
2.3.3 Определение коэффициента поглощения радиоволн в атмосфере
Поглощение радиоволн в атмосфере зависит от длины волны и включает в себя: поглощение в гидрометеорах, в кислороде и молекулах воды. Зависимости коэффициента поглощения в дБ/км, при сильном дожде, в кислороде и молекулах воды от длины волны приведены на графиках, рисунок 2.5 – 2.7.
...
2.4.1 Определение частоты модуляции
К параметрам модуляции относиться: частота модуляции, закон изменения частоты, девиация частоты и требования к стабильности частоты модуляции и девиации частоты.
При сканировании пространства, за время облучения РЛС измеряет дальность до нескольких целей. Выбираем симметричный треугольный закон модуляции.
...
2.7 Оценка влияния отражений от гидрометеоров
Отражение от капель воды может замаскировать наблюдаемые цели, эффект маскировки зависит от интенсивности дождя. Удельную объемную ЭПР дождя при интенсивности 16 мм/ч и длины волны 3 см, определим по графику на рисунке (2.9).
...
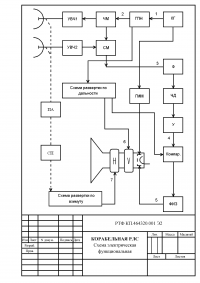
4 Описание работы схемы
Электрическая функциональная схема данной РЛС представлена в приложении. Работа данной схемы заключается в следующем.
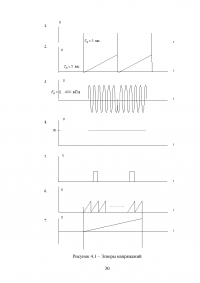
Кварцевый генератор (КГ) вырабатывает напряжение с частотой равной частоте модуляции =200 Гц. Применение в качестве задающего генератора кварцевого генератора позволяет получить достаточно большую стабильность частоты, что сказывается на точности измерения дальности. Далее этот сигнал поступает ...
...
Эпюры напряжений, поясняющие работу схемы, изображены на рис. 4.1.
...