| Код | 427855 | ||
| Дата создания | 2019 | ||
| Страниц | 43 ( 14 шрифт, полуторный интервал ) | ||
| Источников | 16 | ||
| Изображений | 3 | ||
|
Файлы
|
|||
|
Без ожидания: файлы доступны для скачивания сразу после оплаты.
Ручная проверка: файлы открываются и полностью соответствуют описанию. Документ оформлен в соответствии с требованиями ГОСТ.
|
|||



Робототехника (от «робот» и «техника»; англ. robotics — роботика, роботехника) — прикладная наука, занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой развития производства.
Робототехника опирается на такие дисциплины, как электроника, механика, кибернетика, телемеханика, мехатроника информатика, а также радиотехника и электротехника. Выделяют строительную, промышленную, бытовую, медицинскую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.
Слово «робот» происходит из словацкого языка (robot, от robota — подневольный труд) и означат автоматическое устройство. Такое устройство работает по заранее заложенной программе и получает информацию об окружающем мире через датчики, как живые организмы через органы чувств и анализирует их. Робот самостоятельно выполняет операции, которые обычно выполняет человек. При этом робот может получать команды от человека или действовать самостоятельно (автономно).
Актуальность темы реферата заключается в том, что во все времена, для того, чтобы облегчить жизнь люди создавали, изобретали разнообразные механизмы и машины, и в мире их огромное количество. Роботы являются самым высоким достижением человечества. Механизмы с древних времен конструировались для того чтобы они выполняли тяжелую и вредную для человека работу.
Цель работы – более полное изучение истории развития робототехники.
Для достижения поставленной цели необходимо решить несколько задач: рассмотреть историю развития робототехники в древние времена, в средние века, в 17-19 века, развитие робототехнике в 20-ом и 21-ом веках, первые роботы, основные виды роботов и их классификацию, компоненты роботов, способы их перемещения, а также область применения роботов, социальные последствия роботизации и другие моменты.
Структура реферата включает в себя несколько частей: введение, основную часть (две главы), заключение и библиографический список, состоящий из шестнадцати источников литературы.
1.1 Древние времена и средние века
Люди с древних времен мечтали создать механизмы, которые выполняли бы определенную работу и значительно облегчили бы их жизнь. На это указывают многочисленные мифы и легенды. Древние люди присваивали богам то, что казалось для них фантастикой и то, чем хотели бы обладать сами.
Самый известный миф (3 век до н.э.) - древнегреческий, повествующий о создании богом огня Гефестом двух рабынь из золота, прислуживающих ему, а также золотых треножников, выполнявших простейшие команды типа: принести, подать, унести. Позднее Гефест строит бронзового гиганта Талуса для охраны острова Крит от вражеских нашествий. Но есть и другие легенды, в которых Талос имеет иное происхождение. Множество деталей, присутствующих в мифах и легендах, косвенно указывают на то, что, скорее всего, Талос был первым в истории управляемым роботом. Сторонники этой теории подсчитали, что если бронзовый великан обходил Крит за день (согласно мифам), то он должен был перемещаться со средней скоростью 155 миль в час (ок. 250 км/ч). Приверженцы гипотезы "палеокибернетики" предполагают, что при ранении Талоса в лодыжку (по мифам самое уязвимое место гиганта), вместо крови вытекала жидкость, похожая на расплавленный свинец.
...
1.3 Развитие робототехнике в 20 веке
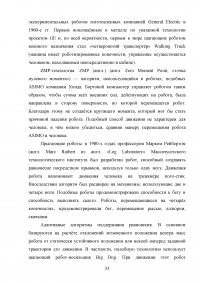
Луи Филип Перью (1900) в Америке создает Автоматического Человека (Automatic Man). "Этот гигант из дерева, каучука и металлов, который ходит, бегает, прыгает, разговаривает и закатывает глаза - практически во всём в точности подражает человеку". Автоматический Человек был ростом 7 футов 5 дюймов (2,25 метра), одет был в белый костюм, носил гигантскую обувь и соответствующую шляпу.
Ли де Форест (1906) патентует вакуумный триод, использовавшийся в качестве переключателя в первых электронных компьютерах
В 1918 г. Михаил Александрович Бонч-Бруевич изобретает ламповый триггер. Триггер способен хранить одну двоичную цифру. Это изобретение закладывает фундамент электронных цифровых компьютеров. Французы Абрахам и Блох (1918) изобретают электрическую счетную машину, которая работает с двоичными числами.
...
1.4 Робототехника в 21 веке
Кевин Уорвик (2000) в Орегонском университете создает первого киборга (кибернетический организм). В небольшой стандартный робот Khepera включены элементы мозга морской змеи. Соединенный с сенсорами мозг реагирует на световые сигналы, перемещаясь в тень при освещении сенсоров. Работы ведутся Орегонским, Чикагским и Иллинойским университетами США, а также университетом Генуи, Италия.
Синтия Брезел (2001), работающая над проектом социально организованных роботов, ставит цель - научить робот KISMET не только думать, но и понимать, что всякие действия имеют последствия. Так ребенок учится вести себя через взаимодействие с другими детьми и взрослыми. Управлять своим социальным поведением и выражением лица роботу помогают 15 внешних компьютеров.
...
1.5 Первые роботы
Первый медицинский робот
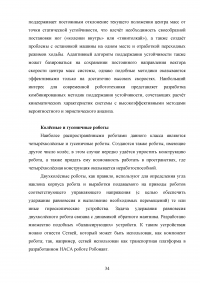
Первое официально зарегистрированное применение медицинского робота относится к 1984 году, когда «Артробот», разработанный в Ванкувере Джефом Окинлеком и доктором Джеймсом Мак-Уэном в сотрудничестве с хирургом Брайаном Дэйем, использовался при проведении ортопедической операции.
«Артробот» — небольшой робот для выполнения артропластики тазобедренного сустава (операции по восстановлению функции сустава). Он был спроектирован для точного сверления тазобедренных суставов, с возможностью программирования для создания полостей в определенных позициях и под определенным углом для последующей имплантации протезов.
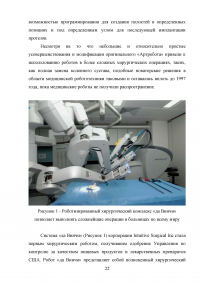
Несмотря на то что небольшие и относительно простые усовершенствования и модификации оригинального «Артробота» привели к использованию роботов в более сложных хирургических операциях, таких, как полная замена коленного сустава, подобные новаторские решения в области медицинской робототехники таковыми и оставались вплоть до 1997 года, пока медицинские роботы не получили распространение.
...
2.1 Основные виды роботов и их классификация
Основные классы роботов – это манипуляционные и мобильные роботы.
Манипуляционный робот — автоматическая машина, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в процессе двигательных и управляющих функций.
Такие роботы производятся в напольном, подвесном и портальном исполнениях. Получили наибольшее распространение в машиностроительных и приборостроительных отраслях.
...
2.3 Способы перемещения роботов
Шагающие роботы
Первые публикации, посвящённые теоретическим и практическим вопросам создания шагающих роботов, относятся к 1970—1980-м годам.
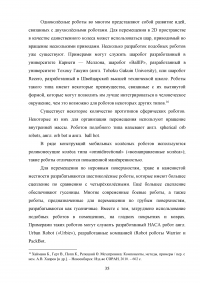
Перемещение робота с использованием «ног» представляет собой сложную задачу динамики. Уже создано некоторое количество роботов, перемещающихся на двух ногах, но эти роботы пока не могут достичь такого устойчивого движения, какое присуще человеку. Также создано множество механизмов, перемещающихся на более чем двух конечностях. Внимание к подобным конструкциям обусловлено тем, что они легче в проектировании. Предлагаются также гибридные варианты (как, например, роботы из фильма «Я, робот», способные перемещаться на двух конечностях во время ходьбы и на четырёх конечностях во время бега).
...
ЗАКЛЮЧЕНИЕ
В ходе проделанной работы выполнены все задачи для достижения поставленной цели: рассмотрены история развития робототехники в древние времена, в средние века, в 17-19 века, развитие робототехнике в 20-ом и 21-ом веках, первые роботы, основные виды роботов и их классификация, компоненты роботов, способы их перемещения, а также область применения роботов, социальные последствия роботизации и другие моменты.
Из вышеизложенного материала необходимо сделать несколько выводов: во-первых, удивительно, но история робототехники, сравнительно молодой науки, насчитывает тысячелетия. Люди давно нуждались в помощниках, которые смогли бы взять на себя тяжелую, монотонную и опасную работу. С другой стороны, механизмы использовались и для развлечений; во-вторых, с начала XXI века многие страны увеличили инвестиции в разработки новых технологий в робототехнике.
...